Looking deep into the eyes

As state departments of transportation (DOTs) shift their attention towards maintenance of existing infrastructure, improving safety in both stationary and mobile work zones is becoming more of a consideration.
One countermeasure to help improve safety in mobile work zones is the truck-mounted attenuator (TMA). TMAs protect the work vehicle by absorbing impacts of rear-end collisions and also perform other functions such as enhancing work-zone visibility, getting drivers’ attention, and notifying drivers of the work-zone presence. Collisions of vehicles with TMAs are a major concern. A TMA crash report by the Missouri Department of Transportation (MoDOT) indicated that there were 139 TMA crashes in Missouri from 2012 to 2017 with distracted driving given as the main reason for 44% of these crashes.
In order to reduce the number of vehicle collisions with TMAs, innovative solutions are needed. MoDOT sought to explore the use of green lights on TMAs as a possible countermeasure to improve mobile work-zone safety. The objective of this project was to assess the effectiveness of green lights on TMAs for MoDOT. To achieve this objective, both a simulator test and field test were used to obtain quantitative measures for different TMA light configurations. For the simulator study, four light configurations were examined as shown in Figure 1: amber/white, green only, green/amber and green/white. The field study included an investigation of only the amber/white and green-only configurations.
Prior studies by the American Association of State Highway & Transportation Officials determined that flashing lights on work vehicles with an asynchronous pattern were more readily recognized by drivers. The studies also found that higher effective intensity lights were better able to garner drivers’ attention but also led to increased glare.
Practices regarding the use of warning lights on maintenance vehicles vary between the state DOTs. Currently, the Ohio Department of Transportation (ODOT) is the only state DOT using green lights. The ODOT color configuration includes green, amber, and white, and its use is limited to snow-removal vehicles. ODOT believes that the green lights help to improve visibility and safety but is still working towards a formal assessment of their safety impacts. The Michigan Department of Transportation (MDOT) is in the process of implementing green and amber lights on snow-removal vehicles with an expected rollout date of Fall 2018. MDOT is currently developing the final layout of the light configuration that will be used.

Figure 2. TMA experiment using ZouSim: (a) Daytime example: green-only TMA; and (b) Nighttime example: green/amber TMA.
Capturing the light
The assessment of the green lights included several approaches: driving simulator study, post-simulator survey and field monitoring. The simulator provided for the efficient assessment of four TMA light configurations in a safe, controlled environment. The post-simulator survey captured information regarding drivers’ preferences and perceptions of the different configurations. In the field study, vehicle speeds and driver behavior were directly observed in a real-world environment for two of the four light configurations from the simulator study.
Driving simulator study
ZouSim, the University of Missouri’s driving simulator, was used for the simulator component of the green-light study. ZouSim is a medium-fidelity simulator built around the half-cab of a sedan. Figure 2 shows an example of the ZouSim configuration for the green-light experiment. The work-zone layout met the requirements of the MoDOT Engineering Policy Guide and is shown in Figure 3.
The simulator testing was comprised of three elements: a TMA light configurations test, a TMA visibility test and a post-simulator survey. Each of the four TMA light configurations shown in Figure 1 was encountered once during daytime and once during nighttime by each participant, with the lights dimmed by half for nighttime. To assess possible disability glare effects at nighttime, a rolling water bottle was placed next to the rear advance TMA, and an eye tracker was utilized to determine if the participants detected the water bottle. The TMA light configurations and disability glare were examined during the same road test. In the post-simulator survey, participants were asked for feedback regarding the four TMA light configurations, including their overall preferences and ratings for the attributes of visibility of work-zone vehicles, awareness of work zones, clear recognition of arrow direction, and easiness on the eyes. For the visibility testing, participants pressed a button when they first ascertained the presence of the work zone and the arrow direction in trials that were conducted separately from the road test.

Figure 3. Mobile work-zone layout for simulator testing.
Field study
The field study included an evaluation for the amber/white TMA and green-only TMA. The field testing was performed on a 31.7-mile stretch of U.S. 50, a four-lane freeway near Kansas City, Mo., in December 2017. For each of the two configurations, four hours of daytime video data and four hours of nighttime video data were collected. The distance of vehicles from the rear advance TMA were measured using an eye-safe active infrared LiDAR detector. A camera was deployed as shown in Figure 4 to capture traffic conditions and driver behavior. Although Missouri state law does not currently allow for the use of green lights on work vehicles, a change in state law was not required for this pilot study. A change in state law would be necessary if MoDOT decides to implement the green lights.
Measurements of Effectiveness (MOEs)
The six MOEs used for the simulator study are described below:
- MOE 1 (First blinker distance, feet): Distance between the participant’s vehicle and the shoulder TMA when the participant first flashed the blinker;
- MOE 2 (Merge distance, feet): Distance between the participant’s vehicle and the shoulder TMA when the participant initiated a merge to the passing lane;
- MOE 3 (Speed when passing the rear advance TMA, mph): Speed of the participant’s vehicle as it passed the back end of the rear advance TMA;
- MOE 4 (Water bottle recognition): Binary indicator of whether or not the participant discerned the presence of the water bottle at nighttime;
- MOE 5 (Work-zone recognition distance, feet): Distance from the participant’s vehicle to the back of the shoulder TMA when the participant observed the work zone; and
- MOE 6 (Arrow direction recognition distance, feet): Distance from the participant’s vehicle to the back of the shoulder TMA when the participant first noticed the arrow direction.
MOE 3 was the main MOE used for the field study. Other MOEs were not useful as vehicles usually merged far upstream from the TMA. The speed of the rear advance TMA (mph) also was measured in the field study to control for the effect of TMA vehicle speed. Vehicle speeds were measured in the field study by applying photogrammetry on the rear videos.

Figure 4. The distance of vehicles from the rear-advance TMA were measured using a LiDAR detector.
Following the eye
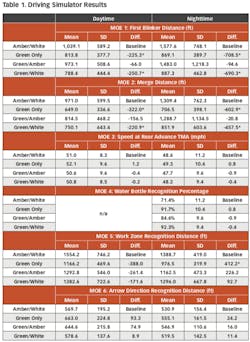
There were 30 participants in the simulator road test and 20 participants in the visibility testing. Eye-tracker data were obtained for 18/30 participants as eye-tracking effectiveness depended on physiology. The daytime results for the simulator tests are shown in Table 1. Driver reactions appeared to be the fastest with the amber/white TMA as this configuration experienced the farthest distances for first blinker, merging and work-zone recognition. The green/amber TMA experienced the second-farthest distances for first blinker, merging and arrow direction. Speed differences between the configurations were not statistically significant. The nighttime simulator results are similar to the daytime results as shown in Table 1. The amber/white configuration led to the lowest rate of water bottle recognition, indicating that disability glare could be a concern with this configuration.
In the post-simulator survey, the green/amber TMA was ranked as the participants’ top preference for both daytime and nighttime. The green-only TMA received the lowest ranking for daytime while the amber/white TMA was ranked the lowest for nighttime. Approximately 2⁄3 of the participants felt that the amber/white TMA lights were too bright at nighttime. For the attribute ratings, the amber/white TMA was rated the highest for visibility and awareness of the work zone but the lowest for arrow direction recognition and easiness on the eyes. The green-only TMA was rated the highest for arrow direction recognition and easiness on the eyes.
The results from the field study are shown in Table 2. During the testing of the amber/white TMA, the TMA speed was significantly lower in the afternoon than in the morning which resulted in reduced vehicle passing speeds. Overall, the passing speeds for the green-only and amber/white configurations were comparable during daytime even with the lower amber/white TMA speeds. Therefore, it is reasonable to conclude that vehicle speeds would be lower with the green-only TMA under similar TMA speeds, i.e., green only is more effective than amber/white. Nighttime vehicle speeds also were lower with the green-only TMA. Vehicle nighttime speeds were lower than daytime speeds.
Does it have the green light?
The study was the first formal evaluation of the performance of green lights on work vehicles under both simulated and real conditions. Overall, the results show that there appears to be an inverse relationship between visibility/awareness of work zone and arrow board recognition/easiness on the eyes leading to trade-offs between the different configurations. In other words, a light configuration that is visible from far away due to high intensity also inhibits arrow-board recognition due to the same high intensity. Due to these trade-offs, none of the four configurations appear to be clearly superior although they all seem to be viable. The trade-offs are an important consideration for agencies contemplating the use of green lights on work vehicles, especially if nighttime operation is contemplated. MoDOT is currently in the process of deciding whether to implement the green lights on its TMAs.
The research produced the first evaluation of green lights on TMAs as current DOT implementations are limited to snow vehicles. The study could be enhanced in several ways in the future, such as testing for novelty effects, seasonal effects due to foliage and other configurations in the field. The use of green lights represents one possible countermeasure for improving work-zone safety. Agencies can consider other countermeasures such as increasing public education and using audio alerts for work zones to help improve mobile work-zone safety.

------------------------
About the author:
Zhang and Qing are graduate research assistants in the Department of Civil and Environmental Engineering at the University of Missouri. Brown is a research engineer in the Department of Civil and Environmental Engineering at the University of Missouri. Sun is a professor in the Department of Civil and Environmental Engineering at the University of Missouri. Edara is a James C. Dowell professor in the Department of Civil and Environmental Engineering at the University of Missouri.