Web Exclusive: Walking safe and smart
According to the World Health Organization, in 2013 nearly half of all fatalities in traffic crashes involved pedestrians, cyclists or people using motorized two-wheeled vehicles. Nearly 6,000 pedestrians died in the U.S. in 2016, according to the Governors Highway Safety Association.
Many of these deaths occurred at intersections. Crossing signalized intersections can be especially dangerous for disabled, blind and visually impaired pedestrians.
Researchers are seeking ways to protect these vulnerable road users (VRUs), defined as “non-motorized road users, such as pedestrians and cyclists and persons with disabilities or reduced mobility and orientation."
To date, most research has focused on sensors and computer vision techniques for detecting the road users at crosswalks. But these techniques perform poorly when people are out of sensors’ line of sight or concealed by darkness or poor weather conditions.
Wireless communications between road users has the potential to overcome these drawbacks.
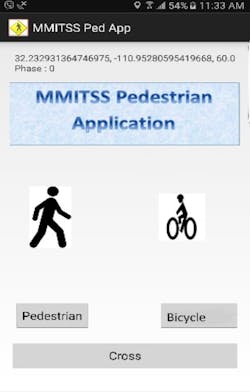
Figure 1
Safer passage with Wi-Fi
Researchers at the University of Arizona have developed a Wi-Fi based assistive system for pedestrians in connected-vehicle environments, where wireless technology enables vehicles to communicate with each other, with infrastructure, and with others on the road.
Connected-vehicle environments include the following different types of communication:
- Vehicle-to-vehicle (V2V);
- Vehicle-to-infrastructure (V2I);
- Vehicle-to-pedestrian (vulnerable road user) (V2P); and
- Pedestrian-to-infrastructure (P2I).
V2I and V2V applications use a fast, secure, and reliable wireless communication technology that operates at the 5.9 GHz frequency, called dedicated short-range communication (DSRC). V2P and P2I communications may use DSRC or other wireless media, including cellular (4G/LTE/5G) or Wi-Fi (802.11). For applications using the connected-vehicle technology, the Society of Automotive Engineers (SAE) has established a set of DSRC message standards (SAE J2735) and a Minimum Performance Requirement of Vulnerable Road Users (SAE J2945/9).
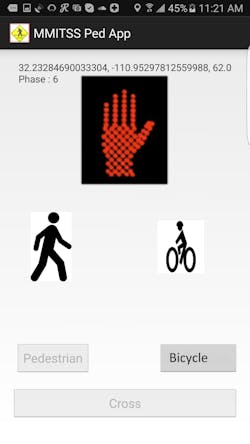
Figure 2
Some of the standard messages include:
- Basic Safety Message (BSM): Vehicles broadcast position and motion information at the rate of 10 times per second;
- Signal Phase and Timing (SPaT): Current status of a signalized intersection.
- MAP Message (MAP): Digital description of the geometry of a signalized; intersection. MAP data is based on accurate GPS measurements, which were obtained using survey grade RTK-GPS equipment; and
- Pedestrian Safety Message (PSM): Pedestrian road user broadcast position and motion information about VRUs, at the rate of 10 times per second.
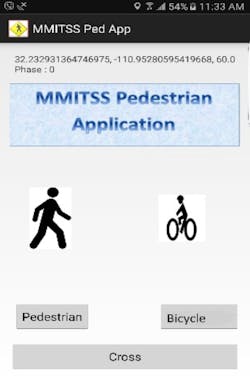
The UA-developed Smart Walk Assistance (SWA) application provides:
- Communication between pedestrians and infrastructure (P2I);
- Situational awareness to improve pedestrian safety (V2P); and
- A correction algorithm to improve pedestrian location estimation to overcome GPS positioning challenges
The SWA was developed for Android operating systems. The smartphone communicates to the local intersection infrastructure equipment using Wi-Fi. MAP data is sent to the application, also via WiFi, and used to determine the location of crosswalks and sidewalks.
The application uses the smartphone’s GPS and inertial sensors to estimate the location and heading of the pedestrian (smartphone). Based on this location estimate, it will determine which crosswalk the pedestrian is facing. If the smartphone’s compass orientation is not properly aligned with the crosswalk, the pedestrian will be alerted and will not be able to access the app. Once the phone is properly positioned, the pedestrian can press the “cross” button, and a pedestrian signal request is sent to the RSU and forwarded to the traffic signal controller.
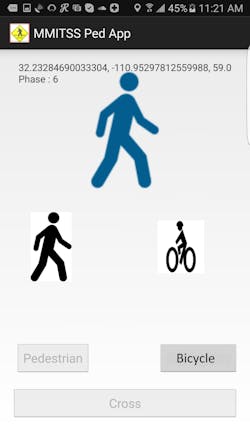
Figure 3
The pedestrian receives real-time signal status on their smartphone, which may be conveyed in visual, haptic or auditory formats, using the standard pedestrian signal head graphics and a combination of auditory and haptic alert. During the “Walk” interval a standard WALK graphic is displayed. During the pedestrian clearance interval (“Flashing Don’t Walk”), the standard pedestrian graphic and a countdown timer are displayed, including an auditory countdown (e.g. 10, 9, 8…). During the “Don’t Walk” interval, a standard DON’T WALK graphic is displayed. If the pedestrian presses the “cross” button during the “Don’t Walk” interval, a message will warn them that the signal is red and it is not safe to cross. Figures 1-4 show real-time visual signal indication on a smartphone.
The SWA also provides situational awareness for improving pedestrian safety. It provides wireless communication between vehicles and pedestrians (V2P) and uses a conflict detection algorithm to detect any possible conflict between pedestrians and vehicles. The SWA application broadcasts the pedestrian’s GPS location information, speed, and heading in real-time periodically, using Wi-Fi to RSU. The RSU re-broadcasts this information to all vehicles through the DSRC broadcast channel.
Lastly, the system provides a correction algorithm to improve a pedestrian’s location estimation. The algorithm uses Map-Matching to project the pedestrian’s location to the nearest point on the MAP and an Extended Kalman Filter to correct for random measurement errors as the pedestrian moves along the MAP.
The UA research project has been developed and tested at the Arizona Connected Vehicle Test Bed (Maricopa County), a 4.6-sq-mile road network in Anthem, Ariz., a suburb of Phoenix. Built in 2007 as one of the nation’s first connected-vehicle test beds, it is managed by the Maricopa County Department of Transportation and Larry Head, professor of systems and industrial engineering and director of the UA Transportation Research Institute at the University of Arizona.
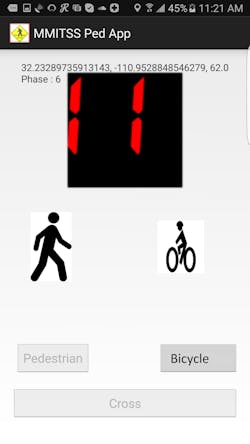
Figure 4
-----------
Khosravi is a PhD candidate at the University of Arizona and has been developing and testing the Smart Walk Assistance app in Anthem.
Lead image credit: Pete Brown/UA College Engineering