How does a human interact with platooning automated vehicles?

With the continued integration of automated vehicles onto the roadways, the interaction between human-driven vehicles and automated vehicles is extremely important. Mixed traffic behavior is imminent, as technology and auto-manufacturing companies are publicizing their autonomous technology as we speak. Waymo, a self-driving technology company, is scheduled to release a fleet of 20,000 fully automated Jaguars in 2022, and many car companies, including Tesla (Autopilot) and Mercedes-Benz, whose 2017 E-Class is equipped with an adaptive cruise control system called Drive Pilot, already have autonomous systems integrated into their current models on the roadways. However, alongside this new wave of autonomous technology equipped vehicles will be the average American driver. The safety of human drivers and passengers inside autonomous vehicles is a heavily debated topic in today’s society. In order to test one aspect of safety, we designed a virtual reality environment in order to look into the behavior of typical human drivers as they change lanes through a platoon of connected vehicles with cooperative adaptive cruise control, to investigate the safety aspects of human driver and automated vehicle interactions. This virtual reality environment allowed us to conduct research safely, and similar experiments have encouraged a variety of testing to occur safely before having to encounter the potential hazards of field testing. We asked participants to drive the simulation scenario multiple times with varying headways and analyzed the data to determine which headways might be acceptably safe in real-life scenarios. The variables considered were speed variation, crash percentages and gender difference.
Project motivation
Modern automobile travel is plagued by congestion. There are no easy solutions to this issue, but one approach is to find a way to achieve better mobility on existing roads in terms of capacity. One technology aiming to achieve this is cooperative adaptive cruise control (CACC). CACC allows vehicles to not only detect the position of the vehicle immediately preceding them, but also receive information from the lead vehicle in a platoon. The primary benefit of CACC is the ability for vehicles to follow one another at shorter headways, thereby increasing the capacity of the roadway, since cars are spaced more closely together.
While the benefits of CACC are clear and quantifiable, questions remain regarding how the technology would perform on the road. One major obstacle is the interaction between vehicles employing CACC and those lacking the technology. Understanding human behaviors during these interactions and designing the technology to mitigate the associated safety risks are necessary steps as CACC becomes a widely deployed capability, ensuring safety and mobility on roadways. One particular scenario requiring safety evaluation is when human drivers make lane changes into platoons of CACC-enabled vehicles. Standard lane changes already are the root of many collisions, and potential dangers in these situations are magnified when CACC and human-driven vehicles are both present. The primary cause for concern in these scenarios is the small gaps between CACC platooning vehicles. Due to these small gaps, a platooning vehicle may not be able to adjust its speed or trajectory when a human-driven vehicle moves into its lane until the human-driven vehicle is completely in front of the CACC vehicle. Complications arising from these situations might present hazardous conditions for both drivers of semi-automated and non-automated vehicles. Understanding how human drivers handle this task is vital to ensuring the safety and mobility of drivers during the integration of CACC technology in the future of automobiles.

Figure 2. Driver’s view during testing
Approach
The goal of this research was to build the trust needed to decrease the uncertainty of autonomous travel, while increasing capacity on the road. Our experimental design involved the creation of a virtual reality environment to replicate real-life interactions between human drivers and CACC vehicle platoons. Our virtual reality system was designed using an off-the-shelf software tool, PreScan, which allowed for the experiment to be cost-effective, safe and flexible to change. The setup also allowed for physiological data to be collected and integrated into these tests. A total of 11 participants were tasked to undergo changing lane scenarios of varying headways, allowing us to observe their driving performance while directly interacting with CACC vehicles in the 10-12 randomized headway trials.
Using PreScan and Matlab Simulink, the virtual scenario was designed to have a single human driver and a platoon of eight CACC vehicles. Using Matlab Simulink, the collected data were analyzed through producing graphs and calculating percentages to determine trends involving speed variance, crash and unsafe scenario statistics, and differences in driving behavior based on gender.
Safety and comfort
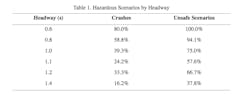
Safety is an important factor in determining the viability of CACC technology and its widespread implementation. To evaluate safety in these tests, the number of trials resulting in a crash or unsafe scenario was recorded for each headway. An “unsafe scenario” was defined as when the human-driven vehicle was within half a car length (1.75 m) of a CACC-enabled vehicle. The findings for the scenario frequencies are summarized in Table 1.
As shown in Table 1, a headway of 0.6 seconds is completely unsafe due to both the high crash and unsafe scenario rates of 80% and 100%, respectively. A headway of 0.8 seconds proved to be safer than the 0.6 seconds headway, with a crash percentage of about 59%, three quarters of the rate that the 0.6 headway crashed. However, a crash and unsafe scenario rates of 59% and 80% are of a very high degree of probability that the human driver would be entering a high-risk situation, therefore 0.8 seconds is not an appropriate headway for CACC vehicle platoons. A slightly greater headway of 1.0 second yielded discouraging results from a safety standpoint, as a crash rate of 39% is certainly not acceptable for the implementation of CACC for public use. The larger headways of 1.1, 1.2 and 1.4 seconds also yielded crash rates of over 1/10 of the time, and the unsafe scenarios percentages were even higher. Thus, it is noted that no headways are safe enough for human drivers to change lanes into the platoon.
It also is noted that performing a lane change with only human drivers on the road requires the merging driver to use their turn signal to alert nearby drivers that they will be changing their position. The second human driver will often yield to allow for the merging vehicle to enter the lane in front of them. In a platoon, CACC vehicles only recognize that the human driver is intending to merge in front of them after the vehicle is already significantly in their lane. Only then will the CACC vehicle adjust the headway between it and the preceding CACC vehicle, creating space and avoiding a crash. The CACC platoons did not yield sufficiently enough, as proven by the significant percentage of crashes and unsafe scenarios present.
In order to gather data on how comfortable the human drivers felt as they were navigating the simulation, we sent out a followup survey. The average self-determined level of comfort on a 10-point scale (10 being the most comfortable) was a 6.6.
However, when asked if they would be comfortable driving through a CACC platoon in a real-life scenario, the average level of comfort for the 0.8 seconds headway was 3.8, and for the 1.0 second headway was 7.4. This again indicates human drivers are not very comfortable in making lane changes in the middle of CACC platoon.
Furthermore, the survey helped explain why the female crash rate for a headway of 0.8 seconds was higher than the male crash rate of the same headway, since female responders determined themselves to be an average of 3.3, while males ranked their comfort at an average of 4.5. One female participant noted that during simulations of headways shorter than 1.0 second, she “definitely wouldn’t have [merged] if I was in a real car,” implying that the level of comfort for anything less than 1.0 second would be unacceptable to drivers.
Conclusions
This virtual reality driving simulator environment realized CACC vehicle platooning and evaluated human drivers’ interactions with the CACC platoon. A total of 320 driving simulation runs with 11 participants were made under various CACC time headways including 0.6, 0.8, 1.0, 1.1, 1.2 and 1.4 seconds. Each driver was tasked to pass through the CACC platoon that does not yield to a human driver. Based on the results from the driving simulation runs, it was concluded that none of the headway scenarios including 1.4 seconds were safe enough to allow human drivers to pass through the platoon. For example, the headways of 0.6 and 0.8 seconds resulted in 80% and 59% crashes, respectively, and even 1.4 seconds headway resulted in 16% crashes. When the unsafe scenario, defined as the human driver maintains less than a half of vehicle length during the lane change (note it is equivalent to 0.2 seconds headway), is considered, 1.4 seconds headway showed 38% unsafe scenarios. These results clearly suggest that future research should focus on how to safely and effectively disjoin the CACC platoon when there is a need for a human driver to pass through the platoon, and/or to determine optimal CACC platoon size such that human drivers can comfortably wait for the CACC platoon and then safely change lanes.